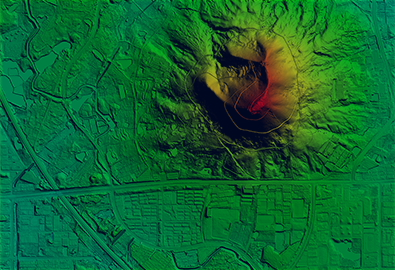
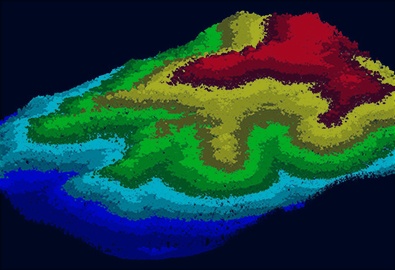
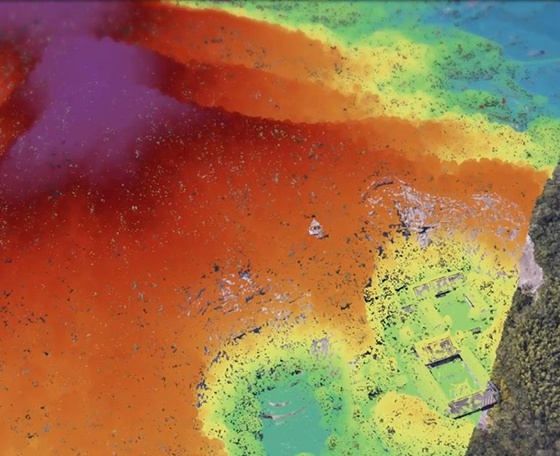
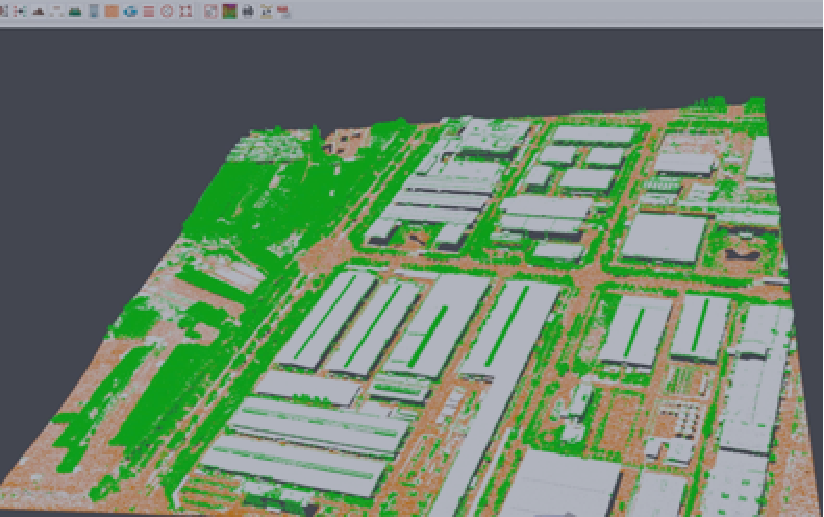
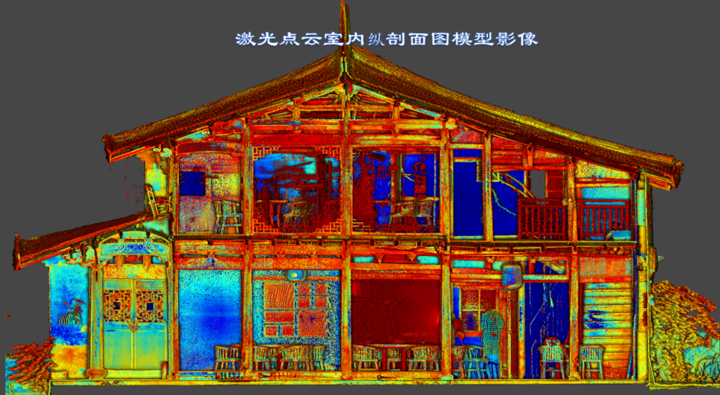
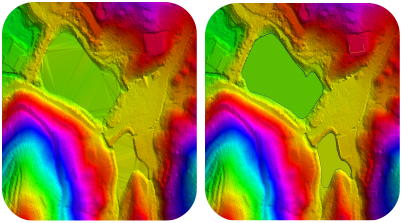
激光雷達,是一種主動式、快速、精確獲取空間三維數據的測量技術。機載激光掃描技術是激光測距技、計算機技術、高精度動態載體姿態測量技術(INS)和高精度動態GPS差分定位技術迅速發展的集中表現。激光腳點在三維空間的分布形態呈現隨機離散的數據點點云。這些點有的位于真是地形表面,有的位于人工建筑物或自然植被上。從激光腳點數據點云中提取數字地面高程模型需要將其中的地物數據點去掉,也就是激光雷達數據的濾波。
1、研究現狀
經過數十年的發展,國外機載激光雷達硬件技術已經比較成熟,然而機載激光雷達數據處理算法仍然處于研究的發展階段,還有一系列問題沒有很好的解決。現有Lidar數據處理過濾算法在地物復雜程度低的情況下濾波效果較好,但自然界復雜的地形特征、地物覆蓋類型(密度高低不一的植被,自然地貌,人造地貌等),再加上機載激光點云的密度高低不一等等原因都有可能造成DTM生成算法在某種特定的區域失敗。所以這些算法在地理環境綜合、地形多變的情況下濾波效果精度不容樂觀,甚至大部分地物都濾除不掉。
2、LIDAR數據預處理
野外飛行后可得到兩組數據,有POS數據和對應瞬時掃描角的激光距離測量值。對數據進行質量分析,若POS數據的位置優于1dm,定向精度優于0.02r可由對應于不丸角的激光測距值和POS數據這三組數據計算激光腳點在WGS-84坐標系中較為精確的三維坐標。坐標轉換的順序是從瞬時激光束坐標系→激光掃描參考坐標系→載體坐標系→慣性平臺參考坐標系→當地水平參考坐標系→當地垂直參考坐標系→WGS-84坐標系。再將Lidar數據由WGS-84坐標變化到所采用的局部坐標系統,所得結果為隨機分布的帶有高程、位置和強度信息的激光腳點點云。

3、LIDAR數據濾波
3.1濾波原理
濾波的基本原理是基于臨近激光腳點間的高程突變(局部不連續)一般不是由地形的陡然起伏所造成,更為可能的是較高點位于某些地物。Lidar濾波時,需建立一個規則用來區分地面點和非地面點。所有濾波算法都需要一個或者多個假設條件。不同算法的假設條件不同,理論模型也有很大的差異,在不同的地質地貌下表現出的數據過濾效果也各不相同。目前所用到的假設條件主要有:非地面點均高于地面點,絕大多數濾波算法都基于此前提。地面坡度變化不會太大,自然地形坡度變化總在一定限度之內,不屬于地形的地物坡度會超過這個限度。
但濾波的假設條件存在一些問題。由于粗差、多路徑效應等,造成最低點并非理想地面點數據,當按照假設條件把這些點作為地面點時將引起很大誤差甚至錯誤。所以在對Lidar數據濾波前,先要剔除粗差。對于條件二在平坦地區假設有效,對坡度較大的山區,并不總是滿足。
3.2濾波方法
隨著Lidar系統的不斷發展,不僅可以提供激光腳點的三維坐標,還可以提供每個激光腳點的強度信息,由此可獲得強度影像,從而可融合強度影像進行濾波分類。很多學者提出了各種濾波方法,根據濾波觀念的不同,大致可以分為以下幾類,基于形態學的濾波算法、基于坡度變化的濾波算法、基于內插的濾波算法、基于曲面約束的濾波算法等方法。
3.2.1基于形態學的濾波算法
基于形態學的濾波算法借鑒于柵格圖像處理,基于區塊操作。形態學法先把Lidar點云重新組織成行列有序的規則格網形式這樣便于使用很多既有的算法,如開閉運算、腐蝕運算、膨脹運算等,并具有直觀、效率高、操作容易等優點,缺點是內插會帶來精度的損失,容易受到濾波窗口大小的影響,并且不能很好的處理地形變化劇烈的區域。
3.2.2基于坡度變化的濾波算法
基于坡度變化的濾波算法基本思想是地形急劇變化產生臨近兩點間高程差異很大的可能性很小,其中一點屬于地物點的可能性更大。算法根據地形坡度變化確定最優濾波函數。為了保留傾斜地形信息,適當調整濾波窗口的大小,并增加篩選閾值的取值以保證屬于地面點的激光點不被過濾掉,且濾波參數的最優值隨著地形的變化而變化。當點顯著高于其鄰域其余點時被認為是地物點,可見遇到坡度變化較大的地形時,就會影響這類方法的精度。
3.2.3基于內插的濾波算法
基于內插的濾波算法的基本思想是先構建一個較粗的起始DEM,再逐步從備選點中篩選并內插加密DEM達到分類的目的。基于內插的濾波方法是一種逐步迭代逐層加密的方式進行數據分類,因此,計算過程存在誤差累積,受到初始DEM影響較大,且每一層的迭代判斷結果受到上一層的影響,如果上一層次的處理出現了錯誤,這種錯誤會導致下一層次的數據點類型判斷出現錯誤。因此,初始DEM的選擇非常重要。在使用此類方法前,一般要剔除數據中的粗差。
3.2.4基于曲面約束的濾波算法
地面可以看作是一個連續且平緩變化的表面,所以,可用帶限制條件的參數曲面約束分類,如:Snake樣條曲面、正交多項式等。約束曲面計算過程中的曲面擬合具有抑制粗差的功能,通常不需要先剔除粗差。此方法過于強調地形的平緩變化,忽略了地形的復雜性,因此,在地形變化劇烈的山區會存在一定問題。由于曲面計算和分析計算量較大,此類算法的運行效率相對比較低。
3.2.5濾波展望
與比較成熟的硬件相比,機載激光雷達數據后處理軟件的發展較為滯后。一些算法和模型仍處于研究階段。目前市場上的各種數據處理軟件能實現不同的功能,各有其優點,數據處理時需選取適合的軟件,有時需要多種軟件配合。
目前任何一種都無法完全保證過濾掉所有的地物,可在以下方面作進一步研究和擴展:利用強度和回波信息;自適應閾值;數據流的引用;結合計算機技術的新理論等。
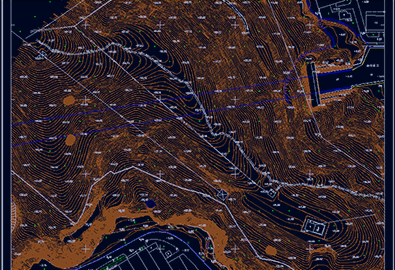
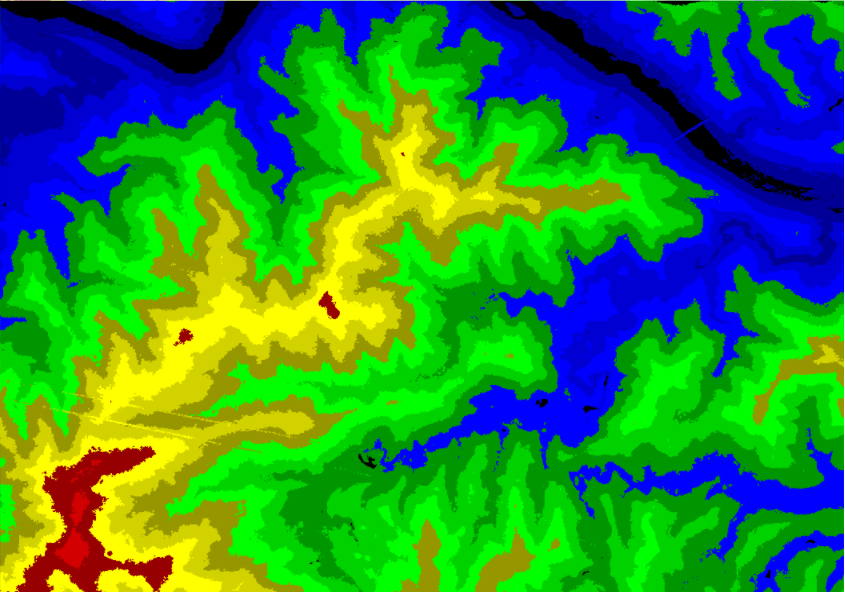
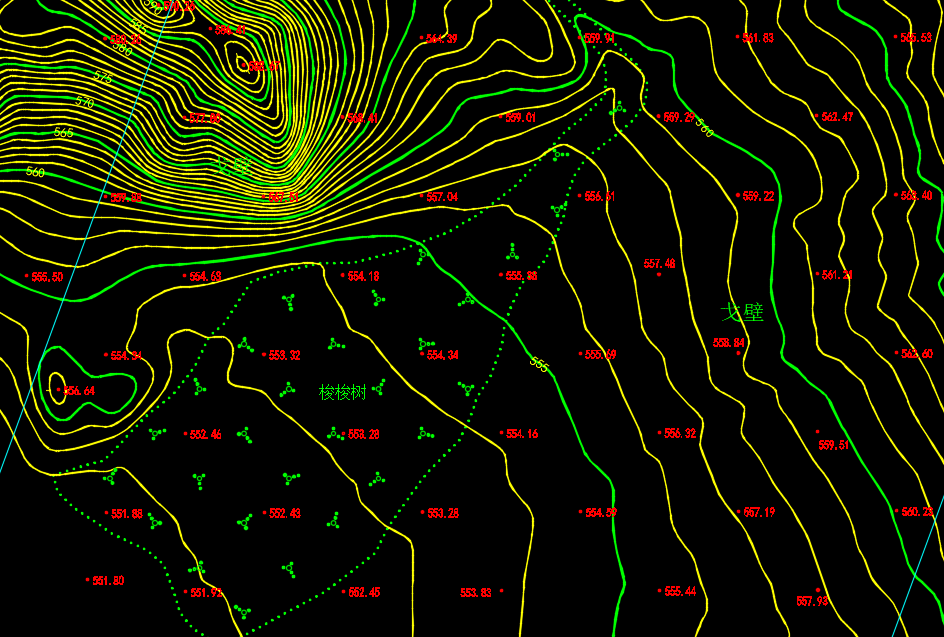
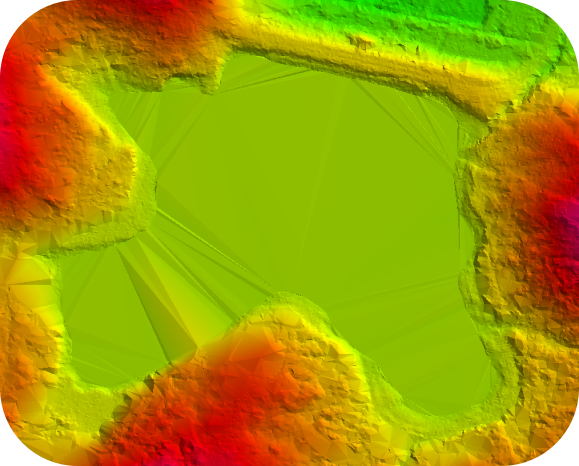
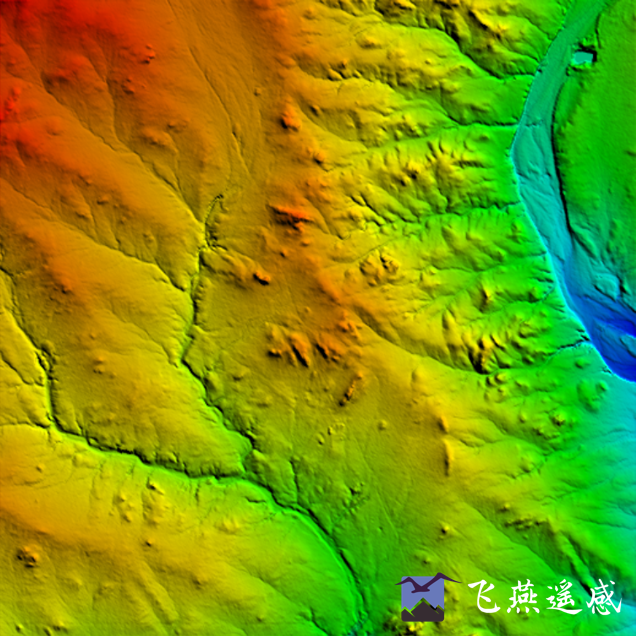
4、DEM的構建
很多軟件都可以完成DEM的生成,但由于濾波不完全,會影像DEM的精度這里可以采用魯棒回歸法、魯棒插值、線性預測法。LIDAR點云的分布是離散的,故數據誤差也不會服從正態分布,所以最小二乘法不是最佳的擬合方法。這時就要采用最小中值二乘方法。線性預測是一種統計內插方法,既可以基于規則格網也可以基于不規則三角網實現。
猜你喜歡:
版權聲明:文章來源于網絡,登載此文出于傳遞更多信息之目的,版權歸原作者及刊載媒體所有,如本文中圖片或文字侵犯您的權益,請聯系我們。

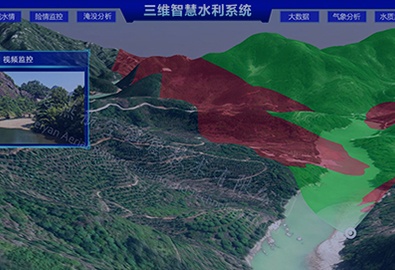
近日,由飛燕航空遙感技術有限公司(以下簡稱“飛燕遙感”)承接的上饒市平地與丘陵地區2米格網數據(DEM、DSM)制作項目順利通過專家組驗收。項目采用飛燕遙感自持機載激光雷達設備,...
項目成果為江西智慧城市建設、空間規劃等領域提供了堅實的數據支撐與決策依據,滿足自...
飛燕遙感外業團隊使用越野車并雇傭有經驗的當地人民帶路進出沙漠,在確保每位外業人員...

LIDAR全名LightDetectionAndRanging,是一種激光掃描測量技術,它利用GPS和IMU(慣性測量...
目前地形數據獲取主要有三種方式:現場實測、三維正射影像轉數字高程模型DEM、激光三維...
數字高程模型,簡稱DEM(DigitalElevationModel),是表達地面高程起伏形態的實體地面模型...
電話:025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南京市玄武區紅山街道領智路56號星河World產業園3號樓北8樓

微信公眾號

總經理微信
版權所有:飛燕航空遙感技術有限公司 ? 2019 備案號:鄂ICP備19029994號-1 蘇ICP備20022669號-1  鄂公網安備:420106020021194號
鄂公網安備:420106020021194號  簡體中文/English
簡體中文/English